-
Catégories de produits
-
Produits en vedette
- Quels sont la résistance à la traction et l’allongement des courroies transporteuses en caoutchouc ?
- Quelles sont les propriétés clés des courroies transporteuses résistantes à la chaleur T1, T2, T3, T4 ?
- Qu’est-ce que le « kg/cm² » dans les courroies transporteuses et comment le convertir en d’autres unités ?
- Comment convertir une bande transporteuse PIW en bande EP ?
- Quelle est la différence entre le PSI et le MPa pour les courroies transporteuses et comment les convertir l’un en l’autre ?
- Comment réaliser un test de mise en auge d’une bande transporteuse
- Les Normes de Test les Plus Complètes pour les Convoyeurs à Bande au Niveau National et Organisationnel
- Quelle est la différence entre les courroies transporteuses résistantes à la chaleur et les courroies transporteuses résistantes au feu ?
- Quelles sont les propriétés chimiques des différents composants du caoutchouc dans les bandes transporteuses en caoutchouc ?
- Le Principe de Fonctionnement des Filtres à Bande Horizontaux sous Vide
SUNGDA FACTORY AREA

Comment analyser la déformation de la bande transporteuse avec ADAMS
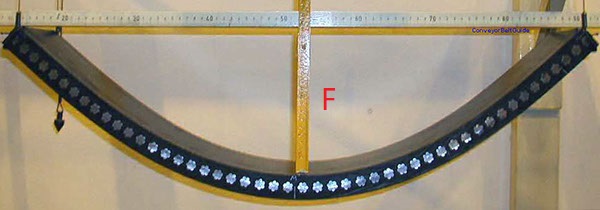
En supposant que la bande transporteuse en caoutchouc ne se déforme pas pendant son fonctionnement, l’équation du mouvement de la section d’essai de la bande transporteuse peut être définie selon la trajectoire de la section d’essai rigide. Définissez les coordonnées du système du modèle de convoyeur à bande au centre de l’ensemble du prototype virtuel, et calculez la trajectoire de mouvement du point de masse au centre de la section d’essai de la section porteuse de la bande transporteuse comme point de départ. La trajectoire formée par la suite.
Afin d’effectuer une analyse numérique sur les caractéristiques cinématiques et dynamiques de la bande transporteuse en caoutchouc, il est nécessaire de sélectionner les unités de la partie d’essai à plusieurs positions typiques sur la bande transporteuse comme points de référence d’analyse : principalement le point centroïde de la partie d’essai au centre de la section porteuse du convoyeur à bande, le point centroïde de la partie d’essai où le rouleau est juste en contact avec la bande transporteuse en caoutchouc, et le point centroïde de la partie d’essai où le rouleau est juste en contact avec la bande transporteuse, soit trois points au total.
Dans des conditions stables, la vitesse de la bande transporteuse est de 5 m/s, et le cycle de fonctionnement de l’ensemble du système de prototype virtuel du convoyeur à bande est de 2,5024 s. Cependant, en réalité, la phase de démarrage initiale comporte un processus d’accélération du moteur d’entraînement pour assurer une simulation complète de l’effet de simulation de mouvement du système de convoyeur à bande simulé. Il est nécessaire de calculer le temps d’accélération au démarrage du convoyeur à bande dans le cycle. Afin d’observer plus complètement le fonctionnement du convoyeur à bande, le temps de simulation du système est fixé à 10 s, le pas de temps est fixé à 100 étapes, puis cliquez sur le bouton de simulation pour effectuer la simulation du système.
Une fois le modèle dynamique complet de la bande transporteuse terminé, les caractéristiques de transport dynamique du convoyeur à bande peuvent être simulées selon le tambour d’entraînement défini, et la tension correspondante de la bande transporteuse peut être vue intuitivement à partir du diagramme de résultat de simulation. La variation progressive provoque la déformation de la bande transporteuse. Sous différentes conditions de travail de convoyage, la puissante fonction de traitement graphique d’ADAMS peut être utilisée pour extraire les paramètres de mouvement tels que la vitesse, l’accélération et le déplacement de n’importe quel point sur la bande transporteuse à tout moment. Grâce à ces paramètres de caractéristiques dynamiques, la bande transporteuse en caoutchouc et le rouleau peuvent être analysés plus en détail pour vérifier les conditions de contrainte et la rationalité de la conception de chaque composant. En analysant la vitesse et l’accélération, on peut déterminer la douceur du processus de démarrage et de freinage du tambour d’entraînement du convoyeur à bande et la rationalité du dispositif optionnel. En analysant le déplacement de n’importe quel point sur la bande transporteuse, on peut obtenir si la bande transporteuse glisse et dévie.
La viscoélasticité et la bande transporteuse elle-même entraîneront une différence significative entre le déplacement de mouvement réel de chaque point de la bande transporteuse en caoutchouc et le déplacement de mouvement de la partie d’essai supposée entièrement rigide. Vous pouvez comparer la différence de déplacement entre les deux pour analyser la déformation de la bande transporteuse. Sur la base des idées ci-dessus, l’analyse de simulation de mouvement du système de prototype virtuel du convoyeur à bande est effectuée, et les paramètres tels que la rigidité de contact, le coefficient d’amortissement, le coefficient de frottement et la valeur de pénétration de la surface de contact lorsque le rouleau et la bande transporteuse sont entièrement réglés sont définis.

Balises :Courroie transporteuse en caoutchouc,Courroie transporteuse EP,déformation de la bande transporteuse
Produits associés
-

Quelles sont les propriétés clés des courroies transporteuses résistantes à la chaleur T1, T2, T3, T4 ?
Non. -

Quels sont la résistance à la traction et l’allongement des courroies transporteuses en caoutchouc ?
Non. -

Qu’est-ce que le « kg/cm² » dans les courroies transporteuses et comment le convertir en d’autres unités ?
Non. -

Comment convertir une bande transporteuse PIW en bande EP ?
Non. -
Quelle est la différence entre le PSI et le MPa pour les courroies transporteuses et comment les convertir l’un en l’autre ?
Non. -
Comment réaliser un test de mise en auge d’une bande transporteuse
Non. -

Les Normes de Test les Plus Complètes pour les Convoyeurs à Bande au Niveau National et Organisationnel
Non. -

Causes courantes et solutions pour le fléchissement des courroies transporteuses EP
Non. -

Analyse des Conditions de Démarrage du Convoyeur à Bande
Non. -

Analyse des causes des dommages courants aux bandes transporteuses de moins de 100 mètres
Non.