-
Ürün Kategorileri
-
Öne Çıkan Ürünler
- Kauçuk Konveyör Bantlarda Çekme Dayanımı ve Uzama Nedir?
- T1, T2, T3, T4 Isıya Dayanıklı Konveyör Bantlarının Temel Özellikleri Nelerdir?
- “kg/cm²” Konveyör Bantta Nedir ve Diğer Birimlere Nasıl Dönüştürülür?
- Konveyör bantlarda PSI ve MPa arasındaki fark nedir ve birbirlerine nasıl dönüştürülürler?
- Konveyör bandı oluk testi nasıl yapılır
- En Kapsamlı Ulusal ve Kurumsal Konveyör Bant Test Standartları
- Isıya Dayanıklı Konveyör Bantları ile Ateşe Dayanıklı Konveyör Bantları Arasındaki Fark Nedir?
- Kauçuk konveyör bantlardaki çeşitli kauçuk bileşenlerin kimyasal özellikleri nelerdir?
- Yatay Vakum Bant Filtrelerinin Çalışma Prensibi
- Bant konveyörün aşırı gürültüsünün nedeni nedir?
SUNGDA FACTORY AREA

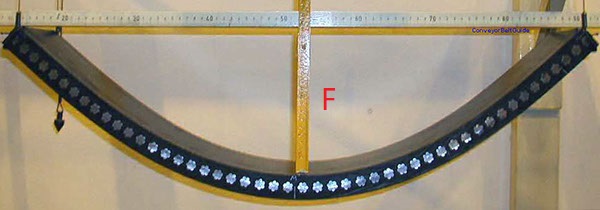
ADAMS ile konveyör bandının deformasyonu nasıl analiz edilir
Lastik konveyör bandının çalışma sırasında deforme olmadığı varsayılarak, konveyör bandının test bölümünün hareket denklemi, rijit test bölümünün yörüngesine göre tanımlanabilir. Bant konveyör modelinin sistem koordinatlarını sanal prototip topluluğunun merkezinde tanımlayın ve taşıma bölümündeki test bölümünün merkezindeki kütle noktasının hareket yörüngesini başlangıç noktası olarak hesaplayın. Sonrasında oluşan yörünge.
Bant lastik konveyör bandının kinematik ve dinamik özellikleri üzerinde sayısal analiz yapmak için, konveyör bandı üzerindeki birkaç tipik konumda test parçası birimlerini analiz referans noktası olarak seçmek gerekir: esas olarak bant konveyörünün yük taşıyan bölümünün merkezindeki test parçasının ağırlık merkezi noktası, lastik konveyör bandıyla tam temas halindeki rulonun bulunduğu test parçasının ağırlık merkezi noktası ve konveyör bandıyla tam temas halindeki rulonun bulunduğu test parçasının ağırlık merkezi noktası olmak üzere toplam üç nokta.
Kararlı koşullar altında, konveyör bandının bant hızı 5 m/s’dir ve bant konveyörünün tüm sanal prototip sisteminin çalışma döngüsü 2.5024 saniyedir. Ancak gerçekte, başlangıç aşamasında, tahrik motorunun hızlanma süreci vardır ve simüle edilmiş bant konveyör sisteminin hareket simülasyon etkisinin tam olarak canlandırılması için, döngü içindeki bant konveyörünün başlangıç ivmelenme süresinin hesaplanması gerekir. Bant konveyörünün çalışmasını daha tam olarak gözlemlemek için sistem simülasyon süresi 10 saniye olarak, zaman adımı 100 adım olarak ayarlanır ve ardından simülasyon düğmesine tıklanarak sistem simülasyonu gerçekleştirilir.
Konveyör bandının tam dinamik modeli tamamlandıktan sonra, bant konveyörünün dinamik taşıma özellikleri, ayarlanan tahrik konveyör kasnağına göre simüle edilebilir ve simülasyon sonuç grafiğinden ilgili konveyör bandı geriliminin kademeli değişiminin bandın deformasyonuna neden olduğu görsel olarak görülebilir. Farklı taşıma çalışma koşullarında, ADAMS’ın güçlü grafik işleme işlevi kullanılarak, konveyör bandı üzerindeki herhangi bir noktanın herhangi bir zamandaki hız, ivme ve yer değiştirme gibi hareket parametreleri çıkarılabilir. Bu dinamik karakteristik parametreleri aracılığıyla, lastik konveyör bandı ve rulonun stres koşulları daha fazla analiz edilerek her bir bileşenin tasarımının mantıklılığı doğrulanabilir. Hız ve ivme analiz edilerek, bant konveyör tahrik kasnağının başlangıç ve frenleme süreçlerinin akıcılığı ve seçime bağlı cihazların uygunluğu belirlenebilir; konveyör bandı üzerindeki herhangi bir noktanın yer değiştirmesi analiz edilerek, bandın kayıp kaymadığı ve sapıp sapmadığı elde edilebilir.
Viskoelastisite ve konveyör bandının kendisi, lastik konveyör bandının her noktasının gerçek hareket yer değiştirmesinin, varsayılan tamamen rijit test parçasının hareket yer değiştirmesinden oldukça farklı olmasına neden olacaktır. İkisi arasındaki yer değiştirme farkı karşılaştırılarak konveyör bandının deformasyonu analiz edilebilir. Yukarıdaki fikirlere dayanarak, bant konveyörünün sanal prototip sisteminin hareket simülasyon analizi gerçekleştirilir ve rulo ile konveyör bandı arasındaki temas yüzeyinin temas sertliği, sönümleme katsayısı, sürtünme katsayısı ve penetrasyon değeri gibi parametreleri tam olarak ayarlanır.

Etiketler:EP konveyör bandı,Kauçuk konveyör bandı,konveyör bant deformasyonu
İlgili Ürünler
-

T1, T2, T3, T4 Isıya Dayanıklı Konveyör Bantlarının Temel Özellikleri Nelerdir?
Hayır. -

Kauçuk Konveyör Bantlarda Çekme Dayanımı ve Uzama Nedir?
Hayır. -

“kg/cm²” Konveyör Bantta Nedir ve Diğer Birimlere Nasıl Dönüştürülür?
Hayır. -
Konveyör bantlarda PSI ve MPa arasındaki fark nedir ve birbirlerine nasıl dönüştürülürler?
Hayır. -
Konveyör bandı oluk testi nasıl yapılır
Hayır. -

En Kapsamlı Ulusal ve Kurumsal Konveyör Bant Test Standartları
Hayır. -

Bant Konveyörün Başlangıç Koşullarının Analizi
Hayır. -

7 Yaygın Konveyör Bant Yırtılma Nedenleri ve Önleyici Tedbirler Nelerdir?
Hayır. -

100 metrenin altındaki bant konveyör bantlarında yaygın hasar nedenlerinin analizi
Hayır. -

Bant konveyörün güvenli çalışması için alınacak önlemler
Hayır.